Als je begrijpt uit welke onderdelen een robot bestaat, snap je ook waarom sommige robots superprecies zijn, andere juist flexibel, en waarom veiligheid zo’n groot thema is. In dit artikel leggen we de belangrijkste robot-onderdelen uit — sensoren, actuatoren, control/besturing en software — met praktische voorbeelden. Zo kun je robots beter vergelijken, kiezen en (als je wilt) zelf beginnen met bouwen of programmeren. (Dit artikel is ook terug te vinden in de uitgebreide sectie over robot-onderdelen: sensoren & actuatoren.)
Wil je eerst het totaalplaatje (soorten robots, toepassingen en trends)? Bekijk de Robots gids. En als je nog helemaal bij nul begint: lees eerst Wat is een robot? of het basisoverzicht Robotica: wat is dat?.
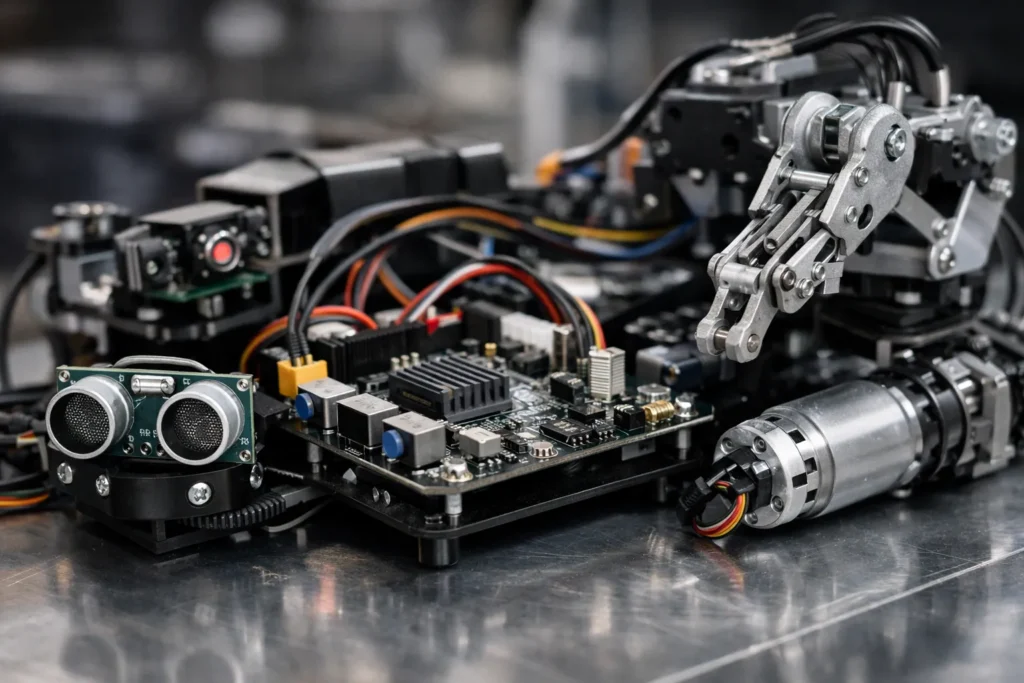
De 4 kernonderdelen van vrijwel elke robot
Je kunt bijna elke robot terugbrengen tot deze bouwblokken:
- Sensoren – meten wat er gebeurt (de “zintuigen”)
- Actuatoren – zorgen voor beweging (de “spieren”)
- Besturing / control – bepaalt hoe en hoe precies (het “zenuwstelsel”)
- Software – neemt beslissingen en voert taken uit (de “hersenen”)
Samen vormen ze een feedbacklus: meten → beslissen → bewegen → opnieuw meten. Wil je eerst de basisdefinitie? Lees Wat is een robot?.
Sensoren: de “zintuigen” van een robot
Sensoren zorgen ervoor dat een robot kan reageren op de omgeving. Zonder sensoren wordt een robot al snel een “domme automaat” die alleen vaste bewegingen herhaalt.
Veelvoorkomende sensor-types (met voorbeelden)
Camera (vision)
- Waarvoor? Objecten herkennen, kwaliteit inspecteren, positie bepalen
- Waar zie je het? Industriële pick-and-place, magazijnrobots, sociale robots
- Let op: licht, reflecties en occlusie (iets dat het zicht blokkeert)
Lidar / dieptesensor (afstand & mapping)
- Waarvoor? Afstanden meten, kaart maken (mapping), navigeren
- Waar zie je het? Mobiele robots in logistiek en service
Ultrasoon / IR-afstandssensor
- Waarvoor? Nabije obstakels detecteren, eenvoudige detectie
- Waar zie je het? Consumer robots zoals robotstofzuigers
IMU (Inertial Measurement Unit)
- Waarvoor? Versnelling/rotatie meten, stabiliteit en balans
- Waar zie je het? Drones, humanoids, mobiele platforms (bijv. een humanoid robot)
Encoders (positie/snelheid van motoren)
- Waarvoor? Precisie in beweging: “waar staat mijn as nu?”
- Waar zie je het? Robotarmen, cobots, vrijwel elke motor-gestuurde robot
Kracht-/moment-sensoren (force/torque)
- Waarvoor? Contact voelen, veilig samenwerken, gecontroleerd duwen/trekken
- Waar zie je het? Cobots, assemblage, revalidatie-robots (zie ook cobots)
Tactiele sensoren (touch)
- Waarvoor? Grijpen zonder beschadigen, slip detectie
- Waar zie je het? Grippers, onderzoek, geavanceerde manipulatie
Sensorfusie: waarom één sensor zelden genoeg is
Veel robots combineren sensoren omdat elke sensor beperkingen heeft. Bijvoorbeeld:
- Camera ziet veel detail maar kan mislezen door licht.
- Lidar is sterk in afstand maar minder in detail.
- IMU is goed voor beweging, niet voor “wat” er om je heen staat.
Door sensorfusie kan een robot stabieler en veiliger werken — vooral bij mobiele robots zoals een robot in magazijn & logistiek of een bezorgrobot.
Actuatoren: de “spieren” van een robot
Actuatoren zetten energie om in beweging. Welke actuator je kiest bepaalt vaak kracht, snelheid, precisie, onderhoud en kosten.
Hoofdtypen actuatoren
Elektrische motoren (meest gebruikt)
- Pluspunten: schoon, precies, relatief eenvoudig te regelen
- Minpunten: bij zware krachten soms groot/duur
- Toepassing: cobots, robotarmen, mobiele robots, consumer robots
Pneumatiek (lucht)
- Pluspunten: snel, krachtig, goedkoop per actuator
- Minpunten: minder precies, perslucht-infrastructuur nodig
- Toepassing: pick-and-place, grippers, eenvoudige industriële bewegingen
Hydrauliek (vloeistof)
- Pluspunten: extreem krachtig, geschikt voor zware systemen
- Minpunten: complexer, onderhoud, lekkagerisico
- Toepassing: zware robots, sommige field robots en bepaalde humanoids
End-effectors: wat zit er “aan het einde”?
Bij robotarmen is het uiteinde vaak belangrijker dan de arm zelf. Denk aan:
- Grippers (vingers)
- Zuignappen (vacuum)
- Lassers / schroefkoppen / spuitkoppen
- Specifieke tools voor een proces
Wil je weten waar robotarmen vooral voor worden ingezet? Lees Robotarm. En voor de fabrieksomgeving: Industriële robots en automatisering met robots.
Besturing (control): hoe een robot precies en veilig beweegt
Besturing is het deel dat bepaalt:
- hoe soepel een robot beweegt,
- hoe nauwkeurig hij een positie haalt,
- hoe hij reageert op verstoringen,
- en hoe hij veilig stopt of uitwijkt.
Control in het kort
Een robot gebruikt vaak een feedback loop:
- Sensor meet positie/snelheid/kracht
- Controller vergelijkt met het doel
- Robot corrigeert beweging
- Herhaal (heel snel, vaak honderden tot duizenden keren per seconde)
Waarom control cruciaal is bij cobots en samenwerking
Als een robot met mensen werkt, wil je:
- contact kunnen detecteren,
- snelheid/kracht beperken,
- en voorspelbaar gedrag.
Meer hierover: Cobot en Robotveiligheid in de industrie. (Voor de menselijke kant: mens–robot interactie.)
Software: van waarnemen naar actie (perception → planning → action)
Software verbindt sensoren, actuatoren en control. Je kunt software grof opdelen in drie lagen:
Perceptie (perception)
- Objectdetectie, mapping, locatiebepaling
- “Wat zie ik en waar ben ik?”
Planning
- Routeplanning, taakplanning, beslissingen
- “Wat ga ik doen en in welke volgorde?”
Executie
- Bewegingscommando’s, foutafhandeling, veiligheidsregels
- “Hoe voer ik dit betrouwbaar uit?”
Hier zie je ook de overlap met AI. Handig als context: Robot vs AI en het overzicht AI en robotica.
Hoe werken robot-onderdelen samen? (praktisch voorbeeld)
Stel: een robot moet een doos oppakken en verplaatsen.
- Sensoren: camera ziet de doos, encoder weet armpositie
- Software: bepaalt waar de doos ligt en plant een beweging
- Control: stuurt motoren zodat de arm precies naar de doos beweegt
- Actuatoren: gripper sluit met gecontroleerde kracht
- Feedback: force sensor checkt of de doos stevig vastzit
- Veiligheid: als mens in de buurt komt → robot vertraagt of stopt
Dit is precies waarom “robot = hardware + software + veiligheid” is, niet alleen een arm of wielen.
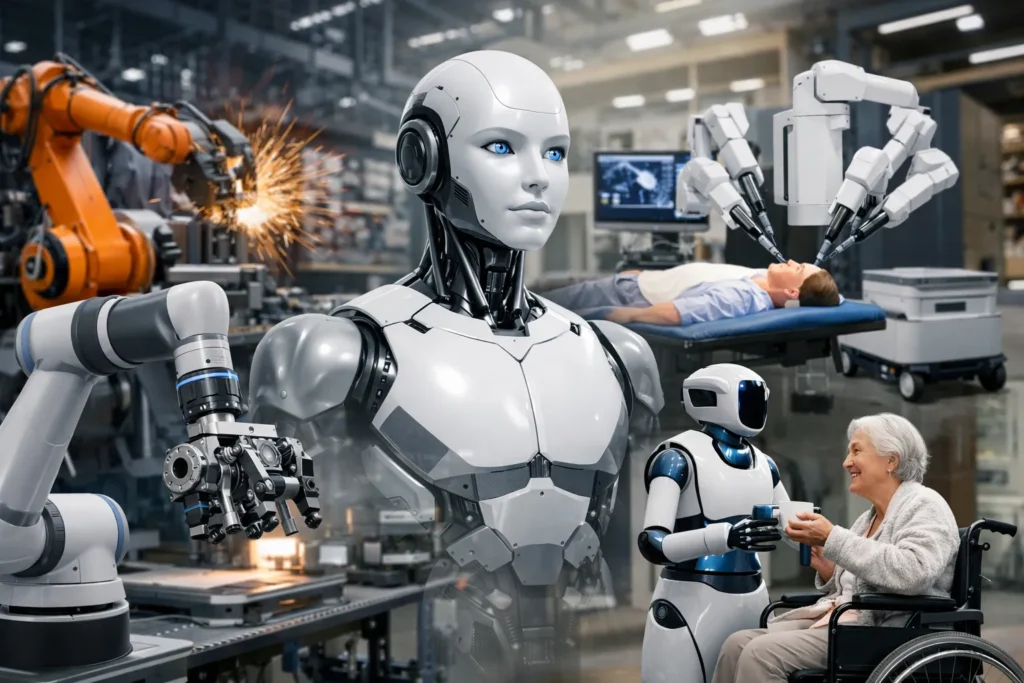
Robot-onderdelen per type robot (handig om te vergelijken)
Industriële robot (robotarm)
- Sensoren: encoders, soms vision
- Actuatoren: sterke motoren, soms pneumatics/hydrauliek
- Focus: snelheid, herhaalbaarheid, uptime
Meer: Industriële robots
Cobot
- Sensoren: force/torque, encoders, soms vision
- Control: extra focus op veilige interactie
- Focus: flexibiliteit en samenwerking
Meer: Cobot
Magazijnrobot / mobiele robot
- Sensoren: lidar, camera, IMU, bumpers
- Actuatoren: wielen/drive system
- Focus: navigatie, obstacle avoidance
Meer: Robot in magazijn & logistiek
Robotstofzuiger / robotmaaier
- Sensoren: afstand, bumpers, soms camera/lidar, cliff sensors
- Focus: mapping, onderhoud, privacy
Meer: Robotstofzuiger en Robotmaaier
Keuzehulp: Robotstofzuiger kiezen en Robotmaaier kiezen
Zorg, onderwijs en horeca (service-robots)
In service-omgevingen draait het vaak méér om sensoren + software + interactie dan om brute kracht. Voorbeelden:
- Zorgrobot en robots in de zorg (voorbeelden)
- Robot in onderwijs
- Robot in horeca
- Sociale toepassingen: sociale robots
Veiligheid & privacy: onderdeel van het systeem
Robot-onderdelen bepalen ook risico’s:
- krachtige actuatoren → meer fysiek risico
- camera/microfoon → privacyrisico
- cloud/software-updates → securityrisico
Verdieping:
- Industrie: Robotveiligheid in de industrie
- Thuis: Robot in huis
- Ethiek: Ethiek van robots
FAQ: Robot-onderdelen (sensoren & actuatoren)
Wat zijn de belangrijkste onderdelen van een robot?
Sensoren, actuatoren, besturing/control en software.
Wat is het verschil tussen sensoren en actuatoren?
Sensoren meten (input). Actuatoren bewegen/handelen (output).
Heeft elke robot een camera?
Nee. Sommige robots werken alleen met encoders, afstandssensoren of krachtmeting. Camera’s zijn handig, maar niet verplicht.
Waarom zijn kracht-/moment-sensoren belangrijk bij cobots?
Ze helpen contact te detecteren en gecontroleerd samen te werken met mensen.
Lees verder (logische vervolgstappen)
- Basis: Wat is een robot?
- Overzicht: Soorten robots
- Robot vs AI: Robot vs AI
- Programmeren: Robot programmeren: beginnen
- Trends: Robotica trends & toekomst
(En als je alles bij elkaar wilt: de Robots gids.)